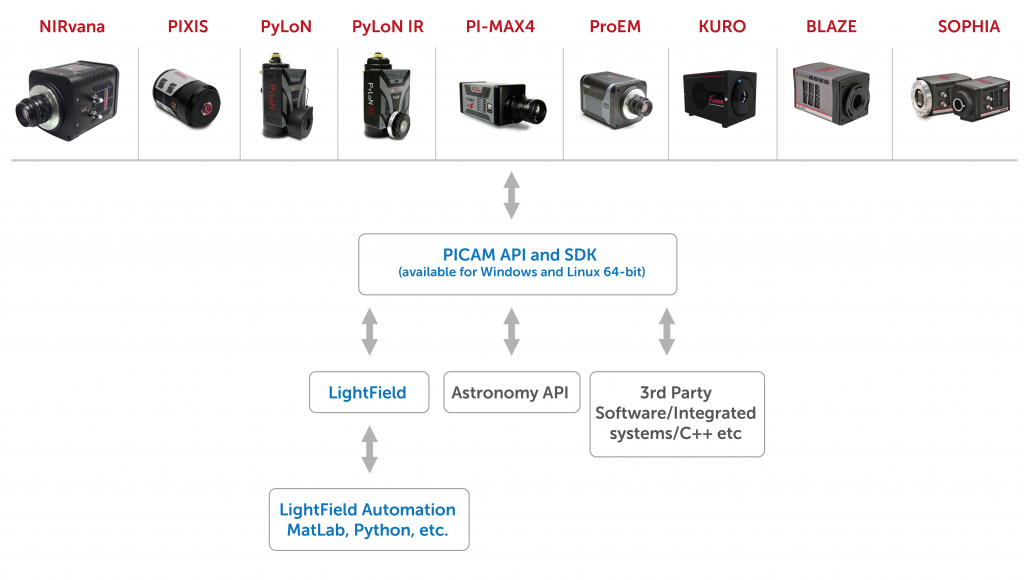
PICam is the driver for controlling all Teledyne Princeton Instruments cameras and is the platform on which LightField software is built. Teledyne Princeton Instruments also offers the PICam API, which can be used to directly automate any Teledyne Princeton Instruments cameras using the C run-time. This, alongside the PICam SDK, provides efficient and direct control of all cameras. It is available for 64-bit Windows and Linux systems (see Hardware Requirements for details).
- Driver for controlling all Teledyne Princeton Instruments’ cameras
- Efficient and direct control of all cameras
- Flexible configuration
- Compatible with operating systems such as Windows and Linux
Key Features
How Does PICAM Work?
PICam automatically collects information on connected Princeton Instruments camera hardware.
Once identified, the hardware can be configured by adjusting any parameter via PICam. The only limitations lie with the constraints of the hardware itself.
Ease of Use
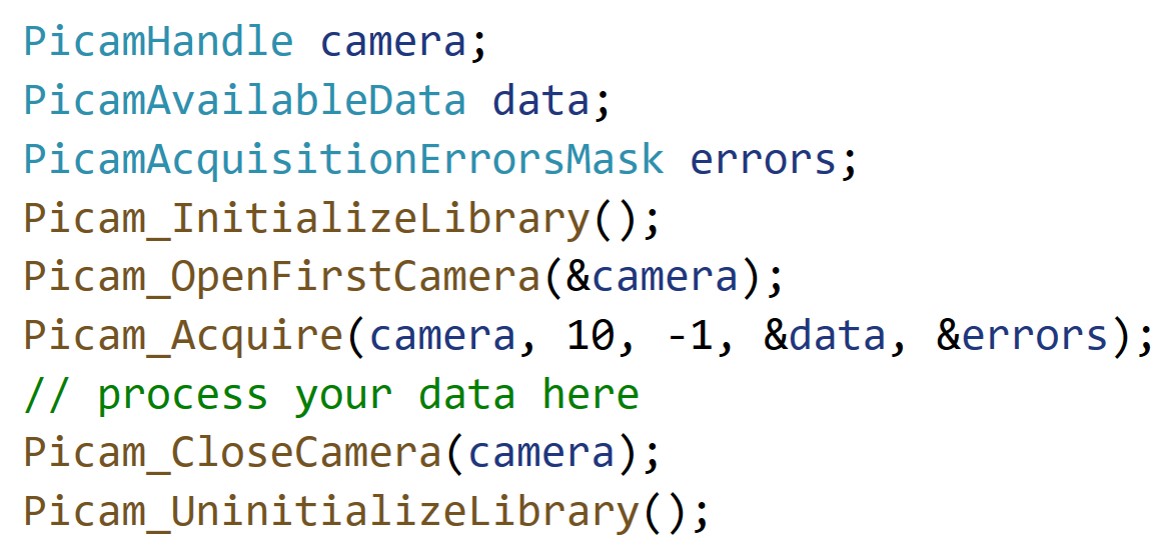
PICam is simple to use, with the ability to capture data with minimal code. For example, running the few lines of code on the right provides 10 frames of data from the connected camera. PICam can also be used for challenging experimental set ups, with the flexibility to be as advanced and complex as required.

Ultimate Flexibility
PICam gives developers, scientists and integrators the option to build their own control and user interface directly on top of the driver.
This gives users the ultimate configuration flexibility to implement specialised processes not available via LightField software, providing optimal performance for their experimental set-up.
Fast Frame Data Access
Fast access to frame data is achievable through PICam via event callbacks. PICam allows an event listener to be registered that runs asynchronously and alerts the system whenever a new frame of data is updated. A callback function can then be implemented that tells the systems how to receive and handle this type of data each time it is received. Any software overhead, however, does not impact frame rate as the camera can acquire frames asynchronously.
PICam SDK: Getting Started

Hardware Requirements
PICam requires a few minimum system requirements to operate. A Teledyne Princeton Instruments camera with internal controller, alongside the appropriate interface card installed in the host computer, is essential. This interface could be USB 3.0, USB 2.0, GigE, or CoaXpress.
PICam also requires a 64-bit operating system such as Windows 7/8/8.1/10 or Linux (only CentOS 7 distribution supported). In addition the computer used required a 2 GHz dual core processor, 4 GB of RAM and 1 GB of storage

Installation of PICam
The PICam installer for Windows and Linux can be requested via our Software and Driver Request Form. The latest release of PICam will always be downloaded from the corresponding link. Once downloaded, run the installer and follow the prompts.

Included Reference Material
Teledyne Princeton Instruments supports PICam with a library of reference material, including a comprehensive programmers manual, a library of sample code, and ready-to-compile projects.
Sample code is provided as C++ source code covering the vast majority of applications with the SDK, including acquisition (asynchronous and synchronous), regions of interest, camera configuration, event call-backs, and more.

Start Integrating Immediately Without Hardware
PICam allows for the use of software emulated “demo” cameras, matching the parameters of the hardware, while producing artificial data. This allows applications to be built without the need for a live camera, ideal for productive remote development. Examples of how to use these emulated “demo” cameras can be found in several projects, such as the ‘Acquire’ project.

Endless Possibilities
Once familiar with the API, there is no need to limit to just C/C++. Projects such as building GUIs for camera control and image analysis are more than achievable with PICam. For example, PICam can be ported to Python for integration with image processing and machine learning libraries.
Resources
PICAM Integration