
Introduction
Scientific CMOS technology offers improvements over previous sensor technologies such as CCD and EMCCD in key performance areas such as speed, noise performance, energy use and sensor size. This has led to the rapid spread of CMOS technology through a broad range of imaging applications over the last decade. However, the current generation of CMOS technology is somewhat limited in two key parameters for scientific imaging: the dynamic range, and linearity of the response. This limited applications requiring precise signal measurements over a large range of possible signal strengths.
However, thanks to innovations in the CMOS readout process, LACera Technology is able to offer unsurpassed dynamic range and linearity, combined with all the other advantages of cutting-edge CMOS technology over previous sensor designs.
What is Dynamic Range?
Dynamic range is a measure of the total number of discernible signal levels that can be measured, determined by the peak signal and the level of noise introduced during readout. When imaging bright and dim objects in the same acquisition, high dynamic range is essential to maintain quantitative measurements, and to allow the detection of weak signals without the saturation of strong signals.
To define dynamic range, we find the ratio of the total number of photoelectrons a pixel can store prior to saturation and loss of linearity (the full well capacity), divided by the read noise. For example, a CMOS pixel with a 10,000 e- full well capacity having a read noise of 3 e- rms has a dynamic range of 3333 or about 70 dB.
Dynamic range is not equal to the total number of grey levels or ADUs (analogue-to-digital units). That is, a camera with a 12-bit Analogue to Digital Converter (ADC), where the signal measurement takes place, does not necessarily have 12 bits of dynamic range (2^12 = 4096 different values), as the noise floor is not yet considered. One must first determine the intrinsic dynamic range of the pixel as above, and then enforce that the ADCs have at least that in bit resolution, preferably higher.
What is Linearity?
For scientific imaging, our intention is typically to measure light, rather than produce an aesthetically pleasing image. This leads to one of the primary differences between scientific cameras and ‘consumer’ or industrial vision cameras – the linearity of their response to light.
When a signal is detected, a digital signal is produced by the camera as a result. Many camera users take it for granted that the signal in will be proportional to the signal out, that increasing the exposure time will lead to a proportional increase in signal for a constant source, and that noise performance of the camera is only dependent on signal due to Photon Shot Noise. However, all of these aspects, vital for making meaningful and reliable measurements of light, are in fact very hard-won through the work of engineers during the manufacture of scientific cameras.
One of the biggest challenges is maintaining good linearity over a large dynamic range – something traditional CMOS cameras struggle with.
How is High Dynamic Range (HDR) Achieved on CMOS Cameras?
Although the bit depth of the analogue to digital conversion doesn’t determine what dynamic range a camera has, it does put an upper limit on it. Until now scientific CMOS cameras could only achieve 12-bit ADCs, meaning our maximum dynamic range was 4096 levels, as that is the number of grey levels or ADUs available. However, many cameras offer higher dynamic range in 16-bit operation. How is this achieved?
High Gain and Low Gain Amplifiers
Although the number of grey levels an ADC represents has an upper limit, typically 12 bits or 4096, the number of actual photoelectrons this corresponds to is free to choose during camera design. The relationship between the two is called the Gain, defined typically in electrons per grey scale (e-/grey), though semantically the ‘higher’ the gain, the lower the number of e-/grey.
High gain, where signals counted in photoelectrons are represented as equivalent or larger numbers of grey levels, leads to both better measurement precision and lower read noise, both of which are key to dynamic range. However, high gain also limits the addressable full well capacity, as the maximum full well capacity that can be addressed by a camera is given by the following:
where the Offset is the value the camera outputs at zero incident signal, typically 100.
For example for a 12-bit camera with gain of 0.5e-/g, the maximum addressable signal is around 2000e-. Lower gain provides access to higher full well capacity, at the cost of precision and higher read noise. However, for high enough signals, photon shot noise would significantly overcome read noise, so the higher read noise would not be an issue.
The answer to achieve both high full well and low read noise is to read signals twice – once at high gain in case the signal is low, and once at low gain in case the signal is high. Weak signals measured with low gain, and strong signals with high gain are filtered out, and a combined value is outputted. In the case that the low gain signal is used, the value is rescaled so that the entire dynamic range of the camera uses the same gain value.
For example, if our camera has a 12-bit high-gain ADC with a 0.5e-/g, and a 12-bit low-gain ADC with 15 e-/g, values under 2000e- could be measured with low read noise and high precision, but our maximum value would be 4096g x 15e-/g ≈ 60,000 e-, allowing access above 2000e-. The actual output of this pixel is stitched into a 16-bit number, where the first ~4000 grey levels are given by the high-gain ADC, and all higher values by the low-gain ADC, rescaled to provide a consistent gain value across the dynamic range – i.e., all low gain signals would be multiplied by 15/0.5, the ratio of the two gains, before readout.
Care is taken to ensure the transition between the two readouts, called the cross-over is as smooth and artifact-free as possible, to ensure that values that are close or on the cross-over between the two amplifiers are measured properly. However, this is the main limitation in the linearity of previous scientific CMOS cameras, with artifacts and non-linearities frequently observed at this cross-over point.
The Drawbacks of Two 12-bit ADCs
The main issue with the combination of two 12-bit ADC measurements is found at the cross-over point between the two ADCs. To provide a wide dynamic range, we want to make one ADC’s gain as high as we can, minimizing read noise. We then make the other ADC’s gain value as low as we can, up to the point that we address the entire full well capacity of the pixel. There are then two problems with this situation:
- The farther apart the two gain values, the less overlap there will be between their output to make a smooth, artefact-free cross-over. Artefacts can be visible both in images with values around the cross-over point, and in the histograms of these images.
- The lower the gain of the low-gain amplifier, the higher the read noise. If read noise becomes similar to the photon shot noise, there can be a sudden jump in the total noise at the cross-over point. This can lead to difficulties in precise gain measurement and can result in artefacts within the image.
The ideal situation for a camera is for as much of its dynamic range to be ‘shot noise limited’ as possible, with minimal contribution of read noise. For good camera performance, at the cross-over point we need the read noise of the low-gain amplifier to be around 10x lower than photon shot noise. However, we also need the high-gain amplifier to use a high gain to reduce read noise for weak signals. This lowers the signal level at which the cross-over point occurs, and hence the photon shot noise.
Higher bit depth ADCs would allow higher gain values to be used for both ADCs, which alongside lower read noise would lead to both dynamic range and linearity improvements. With 12 bits as the limit however, our dynamic range and our linearity is limited. Through attempting to strike a compromise between the two, cameras based on 12-bit ADCs commonly see imaging artifacts at ADC cross-over points. Further, typical read noise at cross-over is approximately equal to shot noise, not the 10x lower that is required for good linearity.
The Drawbacks of Three 12-bit ADCs
One solution proposed to the limitations of two 12-bit ADCs on dynamic range and linearity is to introduce a third, ‘medium-gain’ ADC, with resulting read noise between that of the high- and low-gain ADCs. This helps smooth the transitions between ADCs.
However, the medium-to-low gain ADC cross-over will still have a significant jump in read noise, with the shot noise to read noise ratio at cross-over being typically around 2:1, which will cause artifacts. Moreover, this method of achieving better linearity does not in fact actually increase dynamic range, as the read noise floor and full well capacity are the same as in the two 12-bit ADC case.
However, this is not even the main drawback. The addition of an extra ADC to the readout process would reduce camera speed by 33% compared to two ADCs. What’s more, readout would then produce more heat, which leads to increased thermal noise. Finally re-designing of the camera pixel structure to include the additional ADC would introduce considerable financial cost and engineering time. These drawbacks reduce the advantages of moving to CMOS technology in the first place.
How two 14-bit ADCs offer better noise performance, dynamic range and linearity all at once
To avoid all of these issues, LACera technology uses a new method of achieving unsurpassed dynamic range, combined with low read noise for demanding imaging applications and high-speed readout.
With LACera technology, our proprietary ADC structure allows readout to have a variable number of bits from 10, all the way up to 16, with a single readout. When seeking higher dynamic range, LACera is able to offer an 18-bit readout through the combination of two 14-bit measurements, rather than two 12-bit measurements.
Through increasing the bit depth, higher gain can be used for the high-gain measurement without sacrificing overall full well capacity. Along with the intrinsically low noise of our proprietary ADCs, we have therefore significantly lowered the read noise of CMOS technology, enabling accurate measurement of weaker signals, and unlocking wider dynamic range.
With this higher bit depth, we are able to access high full well capacities without introducing problems at the cross-over point between the two ADCs, giving a shot noise to read noise ratio of the ideal value of around 10:1. This results in much improved linearity without the artifacts seen for the two 12-bit ADC case, better than has ever been seen before with High Dynamic Range CMOS cameras.
Conclusion
Through our proprietary variable bit depth ADCs, LACera technology is able to provide 18-bit readout with a lower read noise than either two 12-bit or three 12-bit ADC readout, while preserving high full well capacity. Further, this unsurpassed dynamic range is combined with a new standard in linearity, providing the most accurate and scientific measurements of detected signals yet seen with CMOS technology.
Further Reading
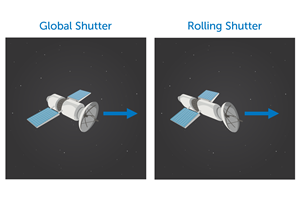
True Global Shutter with Back-Illuminated CMOS
Find out more about how true global shutter on back-illuminated CMOS sensors has been achieved with LACera™ Technology.
Cooling in Large-Area CMOS
Find out more about the deep cooling of LACera Technology, resulting in low dark current with ultimate reliability and cooling performance.
Request a Discussion
Teledyne Imaging is soliciting commercial partnerships. If your organization is interested in learning more please request a technology discussion.